
戰術場景互聯網—未來智能化戰場的神經系統
軍工資源網 2022年01月30日導讀丨
本文提出了戰術場景互聯網的新概念,闡述了其概念內涵、作用機理、能力特征及其關鍵技術,是一篇具有原創性的高水平論文。這一新概念的提出,是面向未來無人化智能化戰場,具備場景認知能力,自主動態構建的一種分布式、無中心、自聚合、自協同的智能化戰術信息網絡。其作用機理是,在節點通過自主發現、自主組網構成分布式、無中心的通用的基礎性網絡連接的基礎上,通過對網絡場景的認知,感知用戶需求、無線環境以及網絡環境等場景要素,基于網絡節點可連通性和網絡資源可用性,通過推理和對已往經驗的學習,智能調度網絡資源、自動調整網絡配置,以匹配網絡場景需要、優化網絡性能,并能夠隨著場景的完成而釋放資源以支持后續場景的建立,支撐實現分散、異構、跨域作戰力量的迅速組合和重組,為動態創建分布式、多效果、多路徑的殺傷網提供平臺,以高度的靈活性和敏捷性,實現更快更強的殺傷力,并給對手以更大的復雜性或不確定性,可以說是未來智能化戰場的神經系統,對基于網絡信息體系的聯合全域指揮與控制技術創新具有重要意義。
戰術場景互聯網
—未來智能化戰場的神經系統
(《指揮與控制學報》刊文精選)
引用格式 汪李峰, 楊學軍. 戰術場景互聯網—未來智能化戰場的神經系統[J]. 指揮與控制學報, 2021, 7(4): 359-364.
WANG Li-Feng, YANG Xue-Jun. Tactical Scenario Internet: A Nervous System of Future Intelligent Battlefield[J]. Journal of Command and Control, 2021, 7(4): 359-364.
摘要
武器平臺的小型化、無人化、智能化成為發展趨勢,將催生高度分散、靈活組合的有人/無人協同作戰、無人集群自主作戰等新型作戰樣式,對傳統戰術通信網絡提出新的挑戰。在深入分析未來新型智能化作戰樣式特點以及戰術通信面臨新需求的基礎上,研究提出一種具備網絡場景認知能力、支持作戰功能要素高度分散、靈活機動、動態組合、自主協同的新型智能化戰術信息網絡——戰術場景互聯網,闡述了其概念內涵、作用機理、能力特征及其關鍵技術。
隨著軍事智能科技與先進信息網絡技術的發展,武器平臺的小型化、分散化、無人化和智能化成為發展趨勢,智能化、自主化系統作為重要的作戰力量滲透于戰爭的各個領域,將不可避免地沖擊傳統作戰樣式,催生高度分散、靈活組合的有人/無人協同作戰[1]、無人集群自主作戰[2]等新型作戰樣式。在新的作戰樣式下,無人系統、坦克、飛機、艦艇等作戰平臺中的感知、指揮、控制、打擊、評估等功能,可以被真實或虛擬分解為最小作戰單元。這些大量作戰功能分散、異構、可快速靈活組合的作戰單元,能夠根據戰場態勢、指揮決策,進行快速組合、分解和重組,自動生成具有多樣式、自適應、高靈活、高抗毀等特性的海、陸、空、天多域協同的分布式殺傷網。傳統的基于確定性的指揮控制關系[3]與流程、預先規劃的層次型通信網絡將難以適應[4],迫切需要構建一種新型的智能化戰術網絡。
1 未來智能化作戰樣式主要特點
未來智能化新型作戰樣式的制勝機理,核心體現為利用智能、分布、動態、跨域等技術優勢,通過跨平臺、跨編組、跨域智能組合重構,提供彈性、靈活性、敏捷性,分布部署、分散風險,以人機協作賦能指揮控制、以異構協同增強殺傷力、以殺傷網絡加強復雜性、以兵力分散提升生存能力,從而實現體系作戰能力的提升,塑造新的軍事優勢。主要呈現出以下特點:
1)智能賦能:利用自主系統和人工智能獲得決策優勢和行動優勢,提高相對于對手的速度和質量,實現更有效的機動作戰。
2)化整為零:作戰功能被分散到大量小型、異構單元,而不是少量功能高度集成平臺,提高系統抗毀性和生存能力。異構,既包括感知、打擊等功能分離異構,也包括陸、海、空、天等多域平臺異構。
3)按需組合:各類作戰單元能夠根據威脅或作戰任務等需要,按需組合起來以形成必要的作戰力量形態。
4)人機協同:人工指揮與機器控制相結合,充分利用人類的靈活性與創造性、機器的速度與規模等各自優勢,使得高度分散力量能夠迅速組合與重組,提升靈活適應能力,給對手以更大的復雜性或不確定性。
5)去中心化執行:以決策為中心,控制權下沉,基于統一的作戰計劃與行動原則,戰術前端自主控制、自主行動。
6)持續快速響應:具有分布式、自適應能力,不僅是一次快速行動,而是不斷適應戰場情況的變化。
7)分布式殺傷網:利用戰場信息網絡構建一個高度分散的分布式非線性殺傷網,同時支持多條并行殺傷路徑,提供較緊密耦合、分布式但線性的殺傷鏈更強的彈性和抗毀性,確保強對抗環境中的作戰能力。
與現有作戰樣式相比較,重要變化在于:
1)指揮控制模式從指揮-控制(command and control, C2)到指揮-控制-通信(command, control and communication, C3)。即從單純的指揮控制到基于通信的指揮控制。不再追求創建一個全時全域連續可靠通信、滿足所有業務需求的戰場通用網絡,而是基于現有可用的通信網絡、能夠聯通的作戰力量組合,實施有效的指揮控制,即決策驅動下的以網絡場景為中心的C3作戰指揮模式。
2)從線性殺傷鏈到非線性殺傷網。不再是作戰資源緊密耦合、作戰環路固化的線性殺傷鏈,而是基于網絡場景、分散部署、跨域異構協同的作戰力量按需組合,創建分布式、多效果、多路徑的殺傷網,縮短作戰周期,增強殺傷力,同時給對手帶來更大的復雜性或不確定性。
3)分布式作戰管理取代集中式指揮控制。不再是把所有裝備混在一個容器里,用指揮控制系統把它們集成在一起,實施集中式指揮控制,而是形成統一的作戰計劃、按照統一的作戰規則,強調統一指揮、分散控制,能隨時隨地無縫共享信息,讓聯合部隊以更有效的方式作戰。
美國國防部高級研究計劃局(Defense Advanced Research Projects Agency,DARPA)于2017年提出的“馬賽克”戰,就是這樣一種面向未來智能化作戰樣式下的典型作戰概念[5]。如圖1所示,充分利用人工智能、自主系統、新一代信息網絡等先進技術,通過將較小的兵力結構功能要素排列重組,實現多種不同形式的兵力設計,靈活運用分散化作戰平臺,動態構建定制化的作戰體系,以適應多域作戰的高動態性、高適應性、高復雜度,從消除“戰爭迷霧”到為對手制造“戰爭迷霧”,旨在使美軍獲得應對對手體系戰的戰爭主動權。
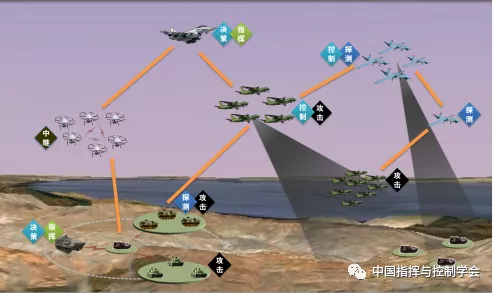
圖1. 未來智能化戰場作戰樣式(任務模塊靈活重構)
Fig. 1 Operation patterns of future intelligent battlefield (flexible reconfiguration of task units)
2 智能化戰場戰術通信面臨的新需求
戰術通信網絡是戰場上直接與敵對抗條件下保障指揮員、作戰部(分)隊、各類武器平臺之間指揮控制或情報傳輸而建立的通信網絡[4],具有無固定基礎設施依托、機動性強、對抗性強等特點,是構建殺傷鏈的主要手段,被譽為信息化戰場的神經系統,一直是各國軍隊發展的重點。
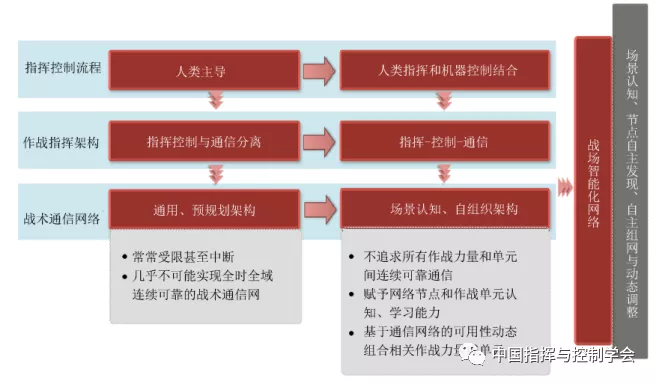
圖2. 新型作戰概念下的戰術通信變革
Fig. 2 The tactical communication revolution in new operation patterns
如圖2所示,傳統戰術通信手段,如戰術互聯網[6]、數據鏈網絡[7]等,都是根據傳統指揮控制方式、確定的指揮關系與流程,構建一個通用的網絡,盡量保持連續可靠的通信,來支持統一的指揮控制體系、滿足多種作戰場景需要、保障包含多類型的綜合業務。然而在復雜的戰場環境中,特別是強敵對抗條件下,通信網絡特別是末端戰術通信網絡,常常受限甚至節點遭毀傷而中斷,全時全域連續可靠的戰術通信網幾乎不可能實現,導致跨域作戰平臺通不好、強敵對抗條件通不了等難題,更難以適應未來智能化戰場快速機動、作戰力量按需靈活組合的要求。
智能化戰場作戰樣式的變革也必將帶來戰術通信模式的轉變。支持C3指揮模式、異構分散的作戰力量按需自主靈活組合、構建分布式殺傷網等,都對戰術通信網絡提出了新的需求。主要體現在以下幾個方面:
1)互聯對象從人機物互聯向智能體互聯轉變。未來智能化戰場,作戰力量或是人類、或是人工智能輔助的有人控制平臺、或是自主智能的無人平臺,都將是具備一定智能化水平的智能體。這些智能體構成的節點既是網絡節點、又是作戰節點,由于智能信息處理、融合以及自主控制等功能,節點之間的互聯,既會在某種程度上降低通信網絡的流量需求,又會在拒止條件下對無人平臺的自主決策控制和網絡自主運維能力提出更高的要求。
2)網絡特性從通用型向場景型轉變。現有網絡是支撐確定性的指揮關系與流程、保障多種綜合業務的通用型網絡;智能化戰場上的網絡,需要基于統一的作戰計劃與規則,在保持通用的網絡連接的基礎上,以特定場景下的業務需求為驅動、基于資源可用性而動態構建的場景型網絡。網絡的組成要素及其連接關系、支持的業務類型等會隨著場景的變化而變化。
3)網絡構造從流程驅動向自主構建、場景驅動轉變。現有網絡以戰場指揮控制、情報偵察等信息流程為需求,驅動網絡的設計、部署與運用;智能化戰場上的網絡,需要在不考慮特定指揮控制關系和信息流程的前提下,節點間首先自主發現并自主組網,以形成通用的基礎性的網絡連接,然后根據作戰應用系統對決策的響應,感知當前的用戶業務需求、無線環境以及網絡環境等場景要素,自主調度更多通信資源來靈活構建相應網絡以適應當下場景,并能隨著場景的切換而動態重組。
4)網絡部署從預規劃、層次型向自組織、扁平化轉變。現有網絡是根據指揮控制的需要以及可能需要保障的用戶和業務等,預先配置相關通信網絡資源、預先規劃構建一個層次型網絡,并盡可能保持一定程度的網絡資源冗余,以盡量滿足用戶入網需求和業務傳輸需求、盡可能應對戰場毀傷、干擾以及作戰時節推進等變化;場景驅動下的智能化戰術網絡,節點具有自主發現和場景認知能力,無需進行預先規劃,能夠自主組網,形成扁平化、分布式的自組織網絡,并進一步根據網絡的節點組成、相互之間的資源可用性以及業務需求,進行自動聚合與通信資源動態分配。
這些變化對網絡的動態性、智能性以及網絡規模的可伸縮性等都提出了更高要求,而且不再是單純的通信網絡,而是與上層作戰應用系統一體設計、智能協同的信息網絡。作戰應用系統應當在充分感知當前網絡連通性和資源可用性的基礎上,智能決策作戰力量組合與任務分配,即實現以網絡場景為中心的C3指揮控制,戰術信息網絡則通過對網絡場景的認知,實現智能化組網。
3 戰術場景互聯網概念內涵及其能力特征
為適應網絡信息體系向智能化演進的發展趨勢,基于未來無人化智能化戰場新型作戰樣式保障需求分析,以網絡場景為驅動、將通信與計算融合、網絡與智能融合,賦以場景認知能力,動態構建場景型戰術信息網絡,是適應未來無人化智能化作戰的有效途徑。為此,提出戰術場景互聯網這一新型戰術信息網絡概念。
3.1 戰術場景互聯網概念內涵
3.1.1基本概念
戰術場景互聯網是面向未來無人化智能化戰場,具備場景認知能力,自主動態構建的一種分布式、無中心、自聚合、自協同的智能化戰術信息網絡。
戰術場景互聯網的作用機理是,在節點通過自主發現、自主組網構成分布式、無中心的通用的基礎性網絡連接的基礎上,通過對網絡場景的認知,感知用戶需求、無線環境以及網絡環境等場景要素,基于網絡節點可連通性和網絡資源可用性,通過推理和對已往經驗的學習,智能調度網絡資源、自動調整網絡配置,以匹配網絡場景需要、優化網絡性能,并能夠隨著場景的完成而釋放資源以支持后續場景的建立。
其中,場景是指特定作戰時間與空間內,用戶需求、節點實體以及所處環境等共同組成的戰場網絡具體情境,主要包括用戶需求、無線環境、網絡環境三大類要素。用戶需求主要是指用戶目標需求和業務傳輸需求,業務傳輸需求是每一類業務對網絡提供的服務質量要求,如帶寬、時延、可靠性等,用戶目標需求一般是用戶根據作戰任務需要,在不同業務及其服務質量之間作出的折衷,是對網絡整體性能的要求;無線環境主要是指戰場電磁環境,包括無線信道環境以及戰場地理環境、氣候條件、敵方干擾等對電磁環境影響的結果;網絡環境主要是指網絡節點組成,各節點的傳輸、交換和計算等網絡資源狀態以及感知、打擊等作戰資源狀態。某個網絡場景就是這些場景要素的集合。
軟件無線電技術的成熟使得無線通信波形的自適應調整成為可能,軟件定義網絡技術的發展為無線網絡的軟件化可重配置提供了可供借鑒的解決途徑(區別在于要實現分布式控制),而智能化的推理與學習能力則要依賴人工智能技術。從技術內涵上來說,戰術場景互聯網實質上是“軟件定義+人工智能”。
3.1.2與其他類似網絡概念的區別
商業互聯網領域的場景互聯網概念,是指智能電視、智能音箱、智能手表、智能眼鏡、家庭物聯網等場景設備上的互聯網,是服務于某些特定場景的專用網,區別于以移動互聯網為代表的通用互聯網。主要目的是深挖用戶需求,細分商業市場,提升系統性能,給用戶以更好體驗。
第五代移動通信系統(5th generation mobile networks,5G)是一個面向場景連接的系統。5G系統以場景驅動進行系統設計,將多樣化的場景“聚類抽象”為具有顯著特征的三大場景[8],但三類場景分別采用不盡相同的技術,目的是實現更精細化和更高效的通信組網性能,不是三種場景互聯網,同時,還不具備對各類場景的感知、自適應調整與學習能力。
戰術場景互聯網是在構建一個通用的基礎性網絡連接的基礎上,通過網絡場景認知與學習,智能化靈活調整出多個場景型網絡,以獲取特定場景下的更高性能。本質上是在通用網絡的基礎上靈活體現出專用網絡能力。
戰術場景互聯網以場景驅動、自主協同的分布式網絡,支撐實現分散、異構、跨域作戰力量的迅速組合和重組,為動態創建分布式、多效果、多路徑的殺傷網提供平臺,以高度的靈活性和敏捷性,實現更快更強的殺傷力,并給對手以更大的復雜性或不確定性,可以說是未來智能化戰場的神經系統。
3.2 戰術場景互聯網能力特征
相對于傳統的戰術通信網絡,在同樣具備分布式、無中心、自組織等特點的基礎上,戰術場景互聯網主要具備以下能力特征:
1)節點自主發現與組網能力。各類陸海空異構節點能夠自主互相發現,基于可用的網絡資源實現自主組網,以形成基礎的分布式、無中心、扁平化的網絡連接,并且不受網絡節點規模的限制。這是戰術場景互聯網的基礎能力。
2)網絡場景感知能力。節點能夠及時感知用戶需求、無線環境和網絡環境等場景要素,基于預先建立的網絡場景模型進行網絡場景合成,為基于場景驅動的資源調度與動態組網提供輸入條件。這是實現場景認知智能組網的前提。
3)場景驅動決策與動態調整能力。節點能夠利用已有的網絡場景知識和感知到的場景信息,進行判斷、規劃、決策和執行,實現場景認知組網的決策和自適應環路,并控制節點各層資源進行動態調整,實現頻率、信道、交換等通信網絡資源的動態分配以及功率、調制、編碼等波形參數與網絡參數的優化配置,從而實現匹配場景需求的自適應組網能力,并且能夠隨著場景的切換而進行資源的釋放和重組。這是戰術場景互聯網的關鍵能力特征。
4)網絡場景學習能力。在對戰術網絡場景建模、組網行為建模的基礎上,網絡節點能夠根據組網行為結果的反饋與評估等手段,進行網絡場景知識的發現、形成、使用與積累,實現場景認知組網的學習環路,從而能夠自主適應陌生場景或更好適應已有場景。這是戰術場景互聯網具備認知智能的核心能力。
5)任務分配與自主協同能力。網絡節點尤其是無人自主節點,能夠基于用戶需求目標、作戰資源狀態和節點聯網狀態,自主決策分配各節點任務,并基于各節點間網絡連接,實現各節點間分布式自主協同的能力,并通過資源的合理分配,支持同時動態構建多條并行路徑。這是戰術場景互聯網支持非線性分布式殺傷網的主要體現。
4 戰術場景互聯網實現關鍵技術
戰術場景互聯網作為一種具備場景認知智能的戰術信息網絡,涉及技術領域主要包括三大部分:傳輸與組網等通信網絡技術、協同與控制等信息系統技術以及建模與認知等人工智能技術。在戰術場景互聯網設計與實現上主要涉及到下列關鍵技術。
4.1 戰術場景互聯網體系架構設計技術
網絡體系架構是對網絡總體功能和內在邏輯作出的一種明確界定,是針對某一特定網絡系統的需求目標而提出的一系列具有指導意義的抽象設計原則及網絡總體結構規約,一般比具體的網絡實現技術更抽象、更通用、更長效,而且通常對于這一特定網絡系統的建設,以及未來發展具有宏觀和全局的指導作用。網絡體系架構研究已經從計算機網絡、信息通信領域延伸和拓展到了統計學、經濟學、物理學、生物學、系統科學、社會科學等多種學科和領域。
戰術場景互聯網體系架構設計,主要研究任務是將人們關于通用網絡體系結構研究所得到的一些普適性原理、技術和方法,運用到面向未來無人化智能化戰場、具備場景認知能力這一特定需求目標的戰術場景互聯網的相關研究中來,并與用戶目標和業務需求一體設計,與人工智能技術相結合,從而最終形成專門針對戰術場景互聯網的新型智能化戰術信息網絡體系架構。研究內容主要包括網絡功能參考模型、拓撲模型、行為模型、流量模型、路由架構、運維管理架構、安全架構等。
目前,已經產生出許多不同類型的網絡體系架構,如國際標準化組織(international organization for standardization, ISO)提出的開放系統互聯參考模型(open system interconnection reference model, OSI/RM)以及運用最為廣泛的互聯網所采用的TCP/IP參考模型等傳統架構,還有面向服務網絡、內容中心網絡、軟件定義網絡等新型網絡體系架構[9]。所有這些網絡體系架構在研究背景、總體結構、層次劃分、構成元素、組網形式、通信協議等方面都存在或多或少的差異。
4.2 網絡場景認知理論與場景認知引擎技術
所謂網絡場景認知,是指網絡節點感知并識別特定網絡場景,通過運用網絡場景知識,進行推理和對以往經驗的學習,自主決策傳輸與組網行為,以適應場景的變化并不斷優化整體性能的過程。
網絡場景認知理論就是對網絡場景和組網行為進行數學建模并高效表示,分析歸納場景與行為之間的耦合機理并進行知識表示,建立并完善網絡場景認知知識體系,設計并構建場景認知環路模型的一系列理論與方法。研究內容主要包括網絡場景分析與建模、電磁行為分析與建模、組網行為分析與建模、場景行為耦合機理分析與建模,以及網絡場景認知知識體系等理論方法。它是戰術場景互聯網實現場景認知智能組網的前提與理論基礎。
場景認知引擎就是在軟件定義的網絡節點平臺上實現基于人工智能技術的推理與學習,實現并驅動整個場景認知環路,從而實現智能化的自主靈活組網。因此,場景認知引擎是對場景認知理論與方法的具體技術實現,是驅動網絡節點物理、傳輸、網絡以及應用等各層實現智能化的核心,是戰術場景互聯網的核心部件,場景認知引擎技術是實現戰術場景互聯網的核心技術。研究內容主要包括場景認知引擎實現架構設計、場景認知高效知識表示、機器推理與學習算法、知識庫構建等。
目前,還沒有場景認知理論和場景認知引擎技術等方面的研究工作。在認知無線電領域[10-11]開展了一些認知引擎技術的理論研究工作,比較典型的有美國弗吉尼亞工學院的無線通信中心和美國國防部通信科學實驗室研究開發的認知引擎,國內也有一些認知引擎架構方面的理論研究,這些研究僅實現了物理層和鏈路層的認知與優化,尚未涉及到場景與行為的建模和認知,但其模型設計對場景認知引擎技術的研究都具有一定參考借鑒價值[12]。在場景認知高效知識表示技術方面,大多數機器表示語言如SDL、UML、IDL以及XML等都是用于描述的計算機語言,但缺乏準確性和靈活性,瑞典皇家科學院開發的無線知識描述語言(radio knowledge representation language, RKRL)以及基于本體(ontology)的知識表示方法都得到了深入研究;可用于場景認知的機器推理[13]人工智能算法主要有狀態空間模型及其查找、基于規則系統、基于案例推理、神經網絡、模糊邏輯、遺傳算法以及基于知識推理等,機器學習[14-15]人工智能算法主要有貝葉斯邏輯、決策樹、Q學習法、時間差分法、神經網絡、博弈論以及遺傳算法等,不同的算法適用于不同的場合,需要針對戰術無線網絡場景與行為的特點,研究選擇合適高效的算法。
4.3 場景驅動智能組網與協同傳輸技術
組網與傳輸技術是實現無線通信網絡建立與維護、信息傳輸與分發的主體技術,主要包括無線傳輸、信道接入控制、網絡路由等方面。與傳統的無線組網和傳輸技術不同,在戰術場景互聯網中,由于場景型網絡特性以及網絡節點的自主性和智能性,一方面降低了全網端到端路由維護和信息傳輸的要求;另一方面又提高了網絡自組織、自重構、自生長的智能化要求。
場景驅動智能組網與協同傳輸技術就是將基于人工智能技術的場景認知理論方法與傳統的組網和傳輸技術相結合,在自主感知場景的基礎上,運用網絡場景知識,驅動網絡各層次資源的靈活調度,實現靈活高效的接入與傳輸、自主智能的組網與維護。研究內容包括基于場景認知的動態頻譜接入、信道接入控制、分布式協同傳輸、自主組網路由以及波形動態重構、拓撲敏捷重構等技術。
4.4 場景驅動智能決策與協同控制技術
場景驅動智能決策與協同控制是戰術場景互聯網作為場景型網絡尤其是支撐無人平臺自主組網的信息網絡,區別于其他通用型通信網絡的關鍵之處。在感知用戶需求以及節點資源狀態等場景要素的基礎上,節點的作戰資源與網絡資源一體考慮,以網絡場景為中心智能決策節點組合與任務分配,并在任務執行過程中根據資源變化情況進行節點間分布式協同控制與動態調整。決策與控制的過程都是與通信網絡資源狀態、傳輸和組網方式等密不可分、相互協調的。場景驅動智能決策與協同控制技術研究內容主要包括多目標約束下的資源分配機制、多智能體分布式協同控制等技術。
5 結束語
未來無人化智能化戰場必將對傳統戰術通信網絡提出更多更高挑戰,具備場景認知智能的戰術場景互聯網,可以實現場景驅動下的智能靈活高效組網,支持分散、異構、跨域作戰力量的迅速組合和重組,支持動態創建分布式、多效果、多路徑的殺傷網。目前的研究還處于起步階段,隨著研究的不斷深入,戰術場景互聯網理論與技術的不斷成熟,戰術場景互聯網必將迎來廣闊的應用前景,成為未來智能化戰場的神經系統。
References
1. 陳杰, 辛斌. 有人/無人系統自主協同的關鍵科學問題 [J]. 中國科學: 信息科學, 2018, 48: 1270-1274.
CHEN J, XIN B. Key scientific problems in the autonomous cooperation of manned-unmanned systems[J]. SCIENTIA SINICA Informationis, 2018, 48: 1270-1274.
2. 段海濱, 邱華鑫. 基于群體智能的無人機集群自主控制 [M]. 北京: 科學出版社, 2018.
DUAN H B, QIU H X. Unmanned aerial vehicle swarm autonomous control based on swarm intelligence[M]. Beijing: Science Press, 2018.
3. 戴浩. 無人機系統的指揮控制 [J]. 指揮與控制學報, 2016, 2(1): 5-8.
DAI H. Command and control of UAV system[J]. Journal of Command and Control, 2016, 2(1): 5-8.
4. 于全. 戰術通信理論與技術 [M]. 北京: 人民郵電出版社, 2020.
YU Q. Communications in Tactical Environments: Theories and Technologies [M]. Beijing: Posts & Telecom Press, 2020.
5. BRYAN C, DANIEL P, HARRISON S. Mosaic warfare: exploiting artificial intelligence and autonomous systems to implement decision-centric operations [R/OL]. [2021-10-02]. https://csbaonline.org/uploads/documents/Mosaic_Warfare_Web.pdf.
6. 王海. 戰術互聯網 [M]. 北京: 國防工業出版社, 2020.
WANG H. Tactical internet [M]. Beijing: National Defense Industry Press, 2020.
7. 趙文棟, 張磊. 戰術數據鏈 [M]. 北京: 清華大學出版社, 2019.
ZHAO W D, ZHANG L. Battlefield Informatization [M]. Beijing: Tsinghua University Press, 2019.
8. YOU X H, WANG C X, HUANG J, et al. Towards 6G wireless communication networks: vision, enabling technologies, and new paradigm shifts[J]. Science China Information Sciences, 2021, 64(1): 74.
9. 鄔江興, 蘭巨龍. 新型網絡體系結構 [M]. 北京: 人民郵電出版社, 2014.
WU J X, LAN J L. Novel network architecture[M]. Beijing: Posts & Telecom Press, 2014.
10. MITOLA J I, MAGUIRE G Q. Cognitive radio: making software radios more personal[J]. IEEE Personal Communications, 1999, 6(4): 13-18.
11. HAYKIN S. Cognitive radio: brain-empowered wireless communications[J]. IEEE Journal on Selected Areas in Communications, 2005, 23(2): 201-220.
12. 汪李峰, 魏勝群. 認知引擎技術 [J]. 中興通訊技術, 2009, 15(2): 5-9.
WANG L F, WEI S Q. Cognitive engine technology[J]. ZTE Communications, 2009, 15(2): 5-9.
13. LEVESQUE H J. Knowledge representation and reasoning[J]. Annual Review of Computer Science, 1986, 1(1): 255-287.
14. BKASSINY M, LI Y, JAYAWEERA S K. A survey on machine-learning techniques in cognitive radios[J]. IEEE Communications Surveys & Tutorials, 2013, 15(3): 1136-1159.
15. SHAI S S. Understanding machine learning: from theory to algorithms[M]. Cambridge: Cambridge University Press, 2014.
作者簡介:
汪李峰(1976—), 男, 軍事科學院正高級工程師, 主要研究方向為戰術通信、認知通信.
楊學軍(1963—), 男, 軍事科學院教授, 中國科學院院士, 主要研究方向為人工智能、群體智能操作系統、智能化作戰體系. 本文共同第一作者.