
軟件所在開源自動(dòng)駕駛平臺(tái)建設(shè)方面取得進(jìn)展
軍工資源網(wǎng) 2023年11月24日中國(guó)科學(xué)院軟件研究所可信智能系統(tǒng)團(tuán)隊(duì)在開源自動(dòng)駕駛(Self-driving System)平臺(tái)建設(shè)方面取得了進(jìn)展,構(gòu)建了開放易用且自主可控的自動(dòng)駕駛算法開發(fā)、測(cè)試、仿真與驗(yàn)證平臺(tái)ISS(https://tis.ios.ac.cn/iss/)。
ISS平臺(tái)基于模塊化的框架,以依賴庫(kù)較少的方式,實(shí)現(xiàn)了涵蓋自動(dòng)駕駛?cè)鞒蹋òǜ兄⒔▓D、定位、預(yù)測(cè)、規(guī)劃與控制等)的幾十種基準(zhǔn)算法(圖1)。ISS平臺(tái)使用簡(jiǎn)單、易于擴(kuò)展,可為科研人員開展自動(dòng)駕駛相關(guān)研究提供支撐。
ISS平臺(tái)體實(shí)現(xiàn)了以下六大模塊功能。傳感器模塊:基于CARLA仿真器支持了常用的傳感器;感知模塊:基于深度學(xué)習(xí)方法實(shí)現(xiàn)了2D檢測(cè)、2D語(yǔ)義分割、Bev地圖生成、3D目標(biāo)檢測(cè)等感知任務(wù);預(yù)測(cè)模塊:實(shí)現(xiàn)了勻速運(yùn)動(dòng)預(yù)測(cè)和基于Motion Transformer的預(yù)測(cè);定位模塊:實(shí)現(xiàn)了基于激光雷達(dá)、慣性測(cè)量單位、全球定位系統(tǒng)等的單傳感器定位和基于卡爾曼濾波器等過(guò)濾器的多傳感器融合定位;規(guī)劃模塊:實(shí)現(xiàn)了基于Lanelet2的FloodFill路線規(guī)劃算法、基于規(guī)則的行為規(guī)劃算法、基于Lattice Planner和EM Planner的運(yùn)動(dòng)規(guī)劃算法;控制模塊:實(shí)現(xiàn)了經(jīng)典的PID和MPC控制算法。
目前,國(guó)防科技大學(xué)、西南大學(xué)、奧地利數(shù)字安全實(shí)驗(yàn)室、德國(guó)薩爾大學(xué)等的科研團(tuán)隊(duì)利用ISS平臺(tái)開展研究。軟件所可信智能系統(tǒng)團(tuán)隊(duì)后續(xù)將對(duì)ISS平臺(tái)各個(gè)模塊的功能繼續(xù)進(jìn)行擴(kuò)展完善,如加入自動(dòng)駕駛可解釋性分析、安全性驗(yàn)證、物理小車及聯(lián)合仿真等功能。ISS平臺(tái)有望成為領(lǐng)域內(nèi)頗有影響力的開源基礎(chǔ)支撐平臺(tái),為國(guó)內(nèi)外自動(dòng)駕駛與可信人工智能等方向的研究團(tuán)隊(duì)提供支持。?
研究工作得到中國(guó)科學(xué)院穩(wěn)定支持基礎(chǔ)研究領(lǐng)域青年團(tuán)隊(duì)計(jì)劃“開放環(huán)境下的可信智能算法”項(xiàng)目的支持。
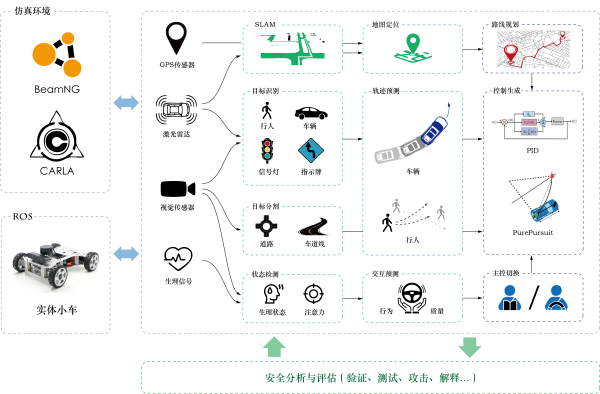
圖1.?ISS平臺(tái)架構(gòu)
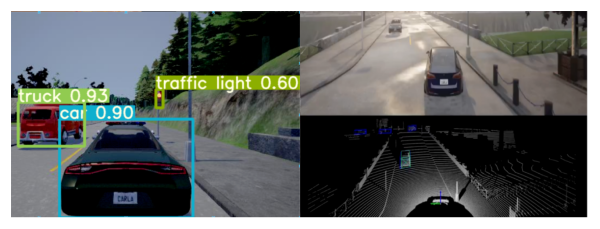
圖2.?ISS平臺(tái)在CARLA仿真平臺(tái)的2D、3D感知效果